技术干货 | 为什么说SLAM2.0时代到来
阅读: 次
2019-11-22 16:53:05
高仙是全球最早从事SLAM技术研发和应用探索的公司之一,成立于2013年,5年间,高仙已成功向下游近百家智能机器人终端企业提供完整的SLAM商用解决方案,并实现了在国内该领域超过60%的市场占比,机器人总体运行超过百万公里。高仙SLAM2.0技术战略近期正式对外公布后受到用户及合作伙伴的关注,究竟SLAM2.0是什么,接下来为大家详解。
SLAM技术通过智能算法(深度学习算法等)进行自主定位、建图,被广泛应用于低速无人机、无人驾驶、机器人应用领域。针对在未知的环境中运动需求,SLAM通过对环境的观测确定自身的运动轨迹,同时构建环境地图,再根据自身位置增量式的构建地图,完成不同领域产品的路径规划功能,从而达到同时定位和地图构建的目的。SLAM技术距今已经有30余年的发展历史,在以上领域都有较好的应用前景。
传统SLAM技术特点与不足
传统SLAM虽然应用广泛,但是对于动态环境的定位建图能力是有欠缺的,表现在缺乏对应的动态实时分析机制。然而SLAM传统的技术缺点主要在于每次重启的起点位姿是初始点,丢失位姿时,将人工移动到地图的零点位置,浪费人力、效率低下,对应用过程中会给用户造成很大不便,总结来说,传统SLAM及导航技术体系存在对复杂环境的适应能力低下、成本较高、定位精度差等缺陷。
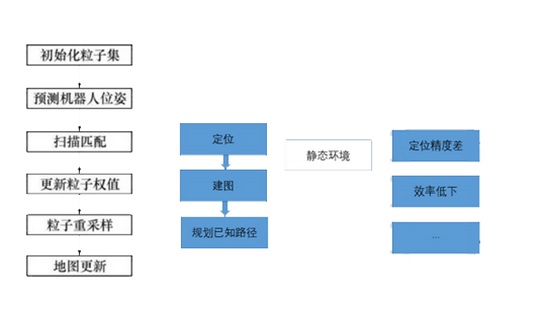
正是为了应对动态环境没有成熟、稳定的解决方案这一现状,高仙整合传统SLAM技术与领先算法,提出了全新的SLAM2.0技术方案,即能完成动态环境下的定位建图能力,并完整地考虑、覆盖了机器人导航应用需求及功能,尤其在商业环境下,针对其动态环境的高频变化,SLAM2.0能够动态地对环境特征进行分析与特征提取,构建完善的动态实时分析机制,并较好的提高系统鲁棒性以及识别准确率,完成定位-建图-导航-重定位-更新动态的螺旋上升系统。
高仙SLAM2.0是什么
高仙SLAM2.0技术方案显著地提高了SLAM多项关键技术指标,且将导航环节涵盖了进来,从而为用户提供了一套完整的机器人自主定位、建图、导航应用系统,与传统技术相比,这一方案具有颠覆性,因此,高仙将它定义为SLAM2.0。
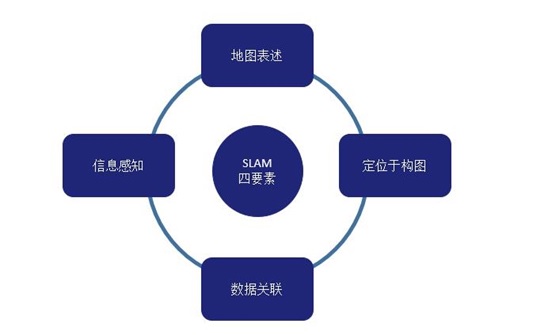
SLAM2.0通过机器人的多传感器,获取动态环境下的数据信息,对环境进行实时定位,并构建动态环境下完整的平面地图,从而让机器人在复杂的环境下具备自主规划、组织、自适应能力。在动态环境中,机器人将能够有效规避动态路障(如,移动的人等),而不需要设置固定的路径;机器人构建动态地图以时间序列获取周围环境信息,与已构建好的地图进行匹配,并采用深度学习算法精确确定其在全局地图中的位置。在技术应用中,SLAM2.0的算法实现主要考虑以下几个关键问题:
1. 地图表示问题——这一需要根据实际场景需求去抉择;
2. 信息感知问题——通过多传感器融合全面地感知环境;
3. 数据关联问题——不同的sensor的数据类型、时间戳、坐标系表达方式各有不同,需要统一处理;
4. 定位与构图问题——即如何实现位姿估计和建模,其中将包括数据计算、物理模型建立以及状态估计、优化等。
基于SLAM2.0进行全局动态定位和环境的自动、智能判断分析识别,同时采用构建地图过程中历史数据的不断更新机制,并利用智能匹配算法以及对匹配结果的综合分析,来确定机器人在全局地图中的位姿,整个方案实现性好、响应快速、准确性高,并且,能够涵盖从数据化获取-数据融合-任务规划-路径规划-运动控制-底层执行全过程。

一般的动态环境主要通过测量两个特征之间的相似程度,具体做法是在两个连续图像帧中提取所有可以提取的特征点,这种做法往往会造成奇异性,SLAM2.0则是在特征比对的基础上,再利用数据融合方法对动态环境进行建图与导航,因而大大提高了效率与准确性。
高仙SLAM2.0关键技术性能的领先性
► 领先的多传感器融合算法,同步集成20+主流传感器
激光、单/双目视觉、超声、防碰撞、防跌落、GPS、红外、UWB、RFID等多传感器数据的融合能力,能够最大程度实现对动态环境的感知,在精确性、鲁棒性、场景分析、避障、建图面积以及成本方面达到最优解。

► 百万平米级建图能力,室外+室内全场景通用
高仙SLAM2.0实现了百万平米建图能力,超业界平均水平20倍,且能够覆盖室内、室外各类复杂场景。

► 1cm-3cm高精度定位
基于强大的环境感知和建图能力,高仙SLAM2.0可在任何地点进行开机识别、全局定位,达到室内1cm-室外3cm的高精度。

高仙SLAM2.0的应用领域与发展前景
在机器人配送、陪伴/看护、扫地以及低速驾驶、远程呈现等场景中,SLAM2.0技术方案将越来越具有核心地位,因为这些场景下机器人自主移动通常会存在环境复杂、粒度细、无法使用GPS等困难,因此,可以说机器人如果要自主移动,几乎只能依赖SLAM2.0。
基于SLAM2.0的新一代技术方案拥有广阔的发展前景,未来的趋势主要有两个方向:一是朝着轻量化、小型化发展,利用SLAM2.0在嵌入式或者小型设备上运行,考虑以它为底层功能的应用。另一方面则是利用高性能计算设备,实现精密的动态三维模型的重建、场景理解等功能,且可以在实现完美重建场景的同时,对计算资源与设备便携性不会有大限制和高要求,让用户能够更便捷、更低成本地开展各类技术开发及应用。










